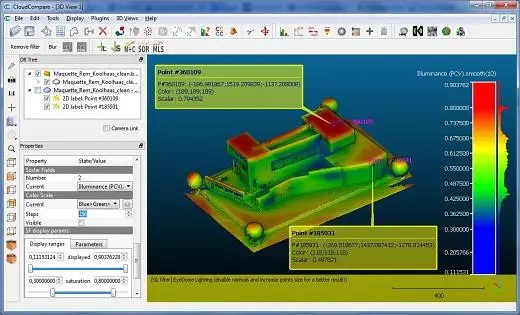
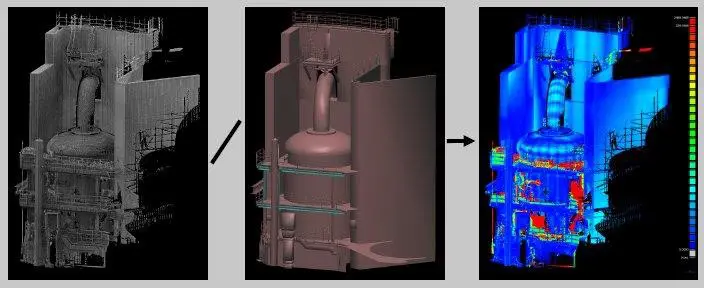
CloudCompareは、3D点群(および三角形メッシュ)処理ソフトウェアです。もともとは、3D点群間でのみ比較を実行するように設計されていました。この特定の機能に比べて優れたパフォーマンス(1)を実現する特定のoctree構造に依存しています。高データレートの3Dレーザースキャナーによってポイントクラウドが取得されたため、CloudCompareは標準のラップトップで巨大なポイントクラウド(通常1000万ポイント以上)を処理することも意味していました。すぐに、点群と三角形メッシュの比較が含まれました(以下を参照)。その後、ポイントクラウド処理の多くのアルゴリズム(登録、リサンプリング、カラー/通常/スカラーフィールド管理、統計計算、センサー管理、インタラクティブまたは自動セグメンテーションなど)と表示強化ツール(カスタマイズ可能なカラーランプ、色&通常のベクトル処理、キャリブレーションされた画像処理、OpenGL高度なシェーダーおよびその他のプラグイン)....
ウェブサイト:
http://www.danielgm.net/cc/カテゴリー